Research
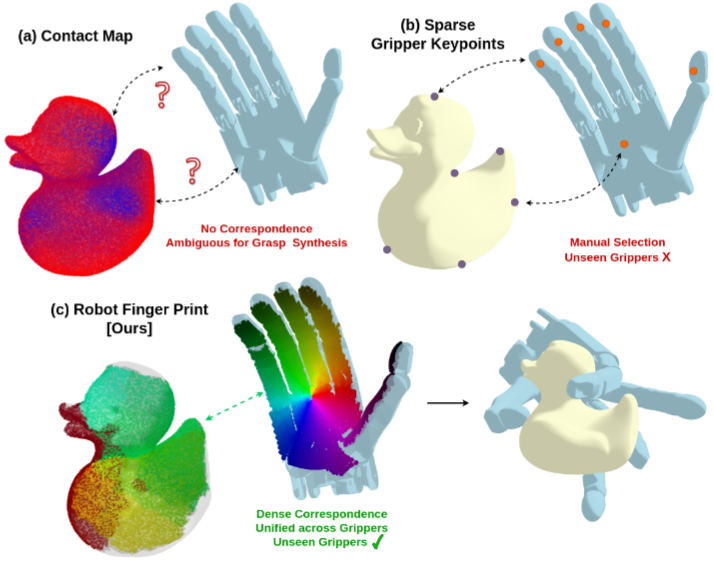
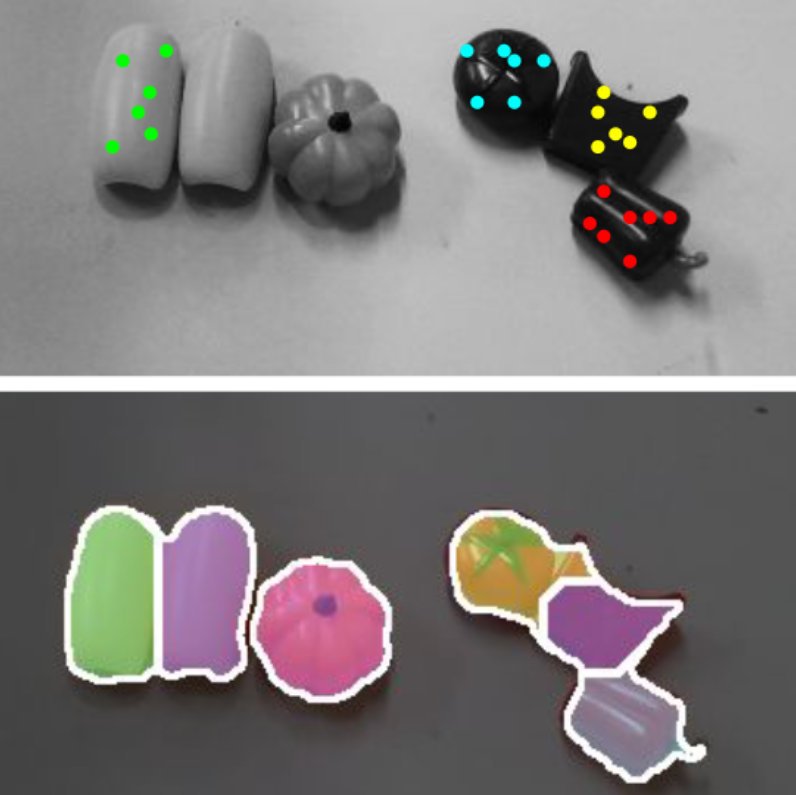
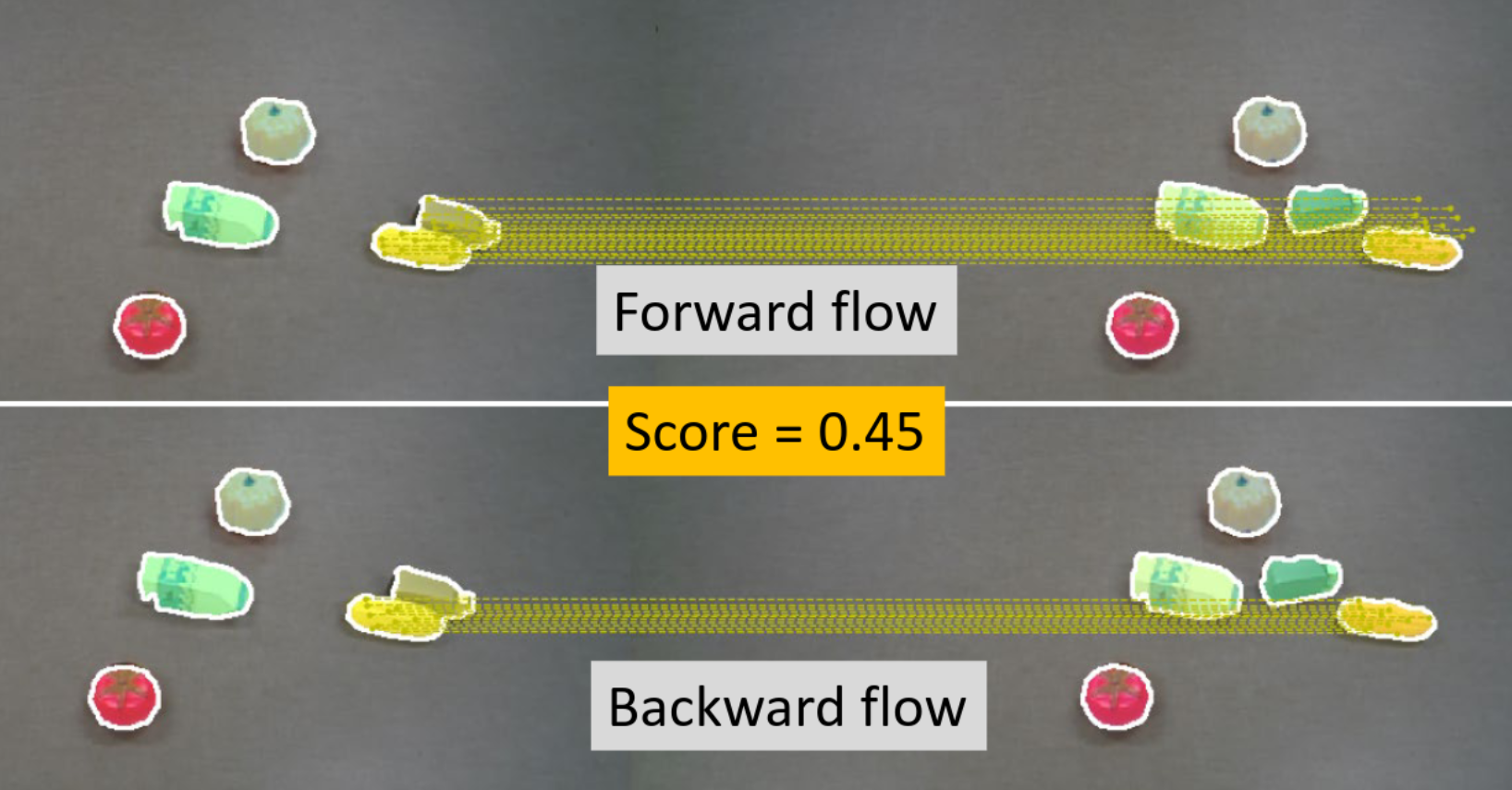
My main research focus is on robot manipulation methods, especially robust grasping. I am interested in developing generalizable grasp and manipulation methods which can scale well to unseen objects and gripper morphologies. I am currently trying to develop generative models for fast and accurate grasp synthesis. In addition to this, I am also interested in interactive perception based methods relating to real world unseen object segmentation.
Service
I have served as a paper reviewer for the following:
- 2025: RA-L, IROS
- 2024: RA-L, IROS, CoRL, ACM MM
- 2023: ICRA, IROS, CoRL, ACM MM
- 2022: ICRA, IROS, ICMR, ICHI, ACM MM
- 2021: IEEE VR, ACM MM
Workshop Organization: Neural Representation Learning for Robot Manipulation , 2023 Conference on Robot Learning
Relevant Publications
With F Casas, B Prabhakaran, Y Xiang
Under Submission
Arxiv
| Project Page

With F Casas, B Prabhakaran, Y Xiang
In IEEE International Conference on Intelligent Robots and Systems (IROS) 2024
Arxiv
| Project Page
With H Qian, Y Lu, K Ren, G Wang, Y Xiang, K Hang
In IEEE International Conference on Robotics and Automation (ICRA) 2024
Arxiv
| Video

With S Allu, Y Lu, J Jaykumar, B Prabhakaran, Y Xiang
In IEEE International Conference on Robotics and Automation (ICRA) 2024
Arxiv
| Project Page
With H Kumar, B Prabhakaran
In IEEE International Conference on AI & extended and VR (AIxVR) 2024
DOI Link
With Z Xu, C Averill, K Palanisamy, K Hang, Y Guo, N Ruozzi, Y Xiang
In Robotics: Science and Systems (RSS) 2023
Arxiv
| Project Page
With B Paniagua, J Vicory
In IEEE International Symposium on Biomedical Imaging (ISBI) 2023 (Oral)
Arxiv
| Code
With N Song, Z Xu, B Prabhakaran, Y Xiang
In Conference on Robot Learning (CoRL) 2022
Arxiv
| Project Page
With K Desai, B Prabhakaran, T Annaswamy
In ACM Designing Interactive Systems Conference (DIS) 2022
DOI Link
With R Iyer, J Bilmes, H Asanani
In IEEE Transactions on Information Theory (ISIT) 2021
DOI Link
With R Iyer, J Bilmes, H Asanani
In Algorithmic Learning Theory (ALT) 2021
| JMLR Link
| Arxiv
|